近日,中国科学院自动化研究所人形机器人攻关团队研制的谱系化人形机器人 Q 系列正式亮相。该团队在国家航天、制造产业等重大需求的推动下,基于“环境吸引域”高精度作业和类脑智能机器人理论等原始创新积累,自主突破了高爆发一体化关节、AI 赋能设计、机器人大模型、类人柔顺控制等核心技术,并成功研制出多台 Q 系列人形机器人样机。
Q 系列人形机器人按照用途可分为三款型号,分别为可以实现自适应室外复杂地形、抗未知干扰需求的仿生高动态机器人 Q1,可实现室内外各种复杂地形自适应与稳定运动的多地形适应机器人 Q2,以及具备批量化机器人鲁棒控制和不同环境适应能力的高爆发运动机器人 Q3。
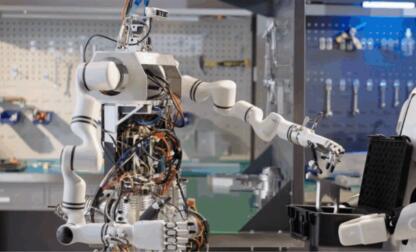
除此之外,团队还研发了类人形机器人 Q4,以进一步探索人类运动特性、精准操作机理的科学研究需求。同时,在室内场景完成多类任务时融入了自动化所自研的紫东太初多模态大模型,构建了对物理环境下机器人任务快速、准确逻辑推理和执行的高并发推理人形机器人 Q5。